|
Материалы научно-исследовательских проектов
Движитель для дирижабля
3.2 Стенд
В основе стендовой установки использован механизм, воспроизводящий механические возвратно-поступательные движения, которые можно использовать для воздействия на исследуемые движители.
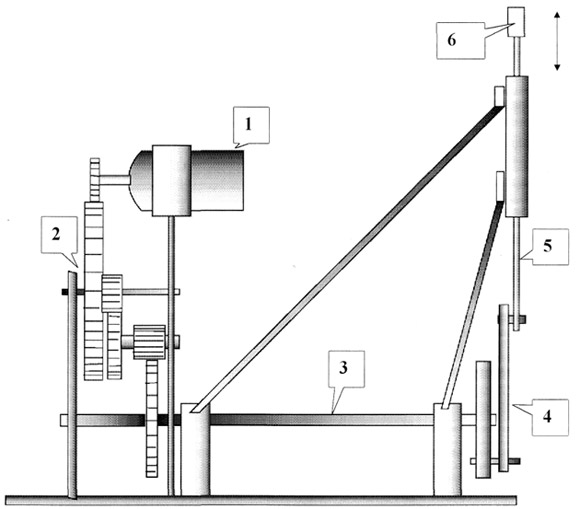
Рис.9 Эскиз стенда для испытаний движителя. 1-электрический движитель, 2-понижающий редуктор из зубчатых шестеренок, 3-передаточный вал вращения, 4-кривошипно-шатунный механизм, 5-шток возвратно-поступательного движения, 6-место крепления движителя
На рис. 9 приведен эскиз стенда (вид сбоку). Энергия вращения электрического двигателя постоянного тока через понижающий редуктор, составленный из зубчатых шестеренок, передается через вал кривошипно-шатунному механизму. В результате вращательное движение двигателя превращается в вертикальное возвратно-поступательное движение штока, на верхнем конце которого находится захват. Этот захват служит передаче энергии колебательного движения штока движителю.
Стенд собран из частей электрических игрушек. Электродвигатель рассчитан на работу от четырех элементов АА по 1,5 В каждый. Редуктор также собран из частей редукторов и зубчатых шестеренок различных игрушек. Вал, кривошипно-шатунный
механизм, шток и каркас стенда собраны из деталей детского конструктора. В результате масса стенда оказалась в пределах 450 грамм.
Частота колебаний штока в зависимости от размеров движителя, его формы и схемы передачи энергии колебаний штока движителю изменялось от 2 до 4 колебаний в секунду. Амплитуда колебаний штока определялась конструкцией и равнялась ±1,0 см.
В целях выполнения измерений силы тяги при работе движителя стенд подвешивался на вертикальную тягу, образуя таким образом физический маятник. Это же позволяло по углу отклонения маятника оценить силу тяги движителя.
3.3 Исследуемые движители
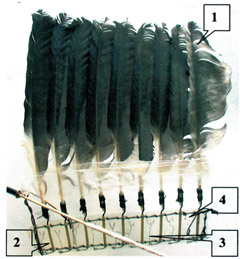
Первым исследованным движителем был движитель, составленный из природных материалов — перьев городской вороны.
Рис. 10 Фотография искусственного крыла из природных материалов – перьев городской вороны (1). 2- устройство, задающее ось вращения пера. 3- возвратная проволочная пружинка, связанная с рычагом оси вращения пера. 4- несущий каркас крыла из слоя полимера толщиной 0,6 мм. Осталось расположить их в нужной последовательности, чтобы образовывалась единая поверхность. Вместе с тем каждое перо должно вести себя самостоятельно при ударе образованным крылом вверх и вниз. В первом случае под действием сопротивления среды они должны, как жалюзи, раскрывать поверхность так, чтобы крыло представляло собой набор отдельных движителей-перьев. Во втором случае под действием сопротивления среды они должны смыкаться в единую крыловую поверхность. Т.е. каждое перо должно иметь свою ось вращения. Возвращению перьев в начальное положение должны способствовать проволочные пружинки. Все это должно крепиться на легком жестком каркасе.
На рис. 10 приведена фотография одного из двух изготовленных крыльев. Промежуток между стволами перьев, каркасом и опахалом заполнялся тонкой пленкой в целях увеличения поверхности крыла.
На рис. 11 показаны оба крыла в действии. В движение крылья приводились на стенде. Стенд в напольном варианте на колесиках позволял
наблюдать его горизонтальное движение под действием машущих движений крыльев. Стенд и крылья по своему взаимному расположению
оказывались похожими на расположение крыльев и корпуса птицы. Пришлось добавить и искусственный хвост для стабилизации движения
стенда. Вибрационное движение каркаса крыльев передавалось перьям. При этом можно было наблюдать жалюзиподобное движение перьев.
Рис.11 Стенд в действии. Аналоги левого и правого крыльев птицы совершают трепещущее движение с малой амплитудой колебаний
Оказалось, что при таком варианте движителя возникала сила тяги, равная 0,1Н, что при массе всего устройства 0,55 кг соответствовало 0,18Н/кг. Качественно эта оценка существенно ниже 0,86 Н для винтового движителя (раздел 1.2). Но это относится к стенду, который допускает уменьшение массы примерно в 5 раз, что сближает показатели, до примерно равных значений. Кроме того, малая из-за конструкционных ограничений амплитуда колебаний крыльев не позволяла увеличить их силу тяги.
Этот первый эксперимент показал, что усложнения крыла в виде несущей поверхности, дополнительных узлов крепления крыльев существенно утяжеляют крыло, не способствуют хорошим аэродинамическим свойствам крыла и скрадывают все преимущества природного материала – пера.
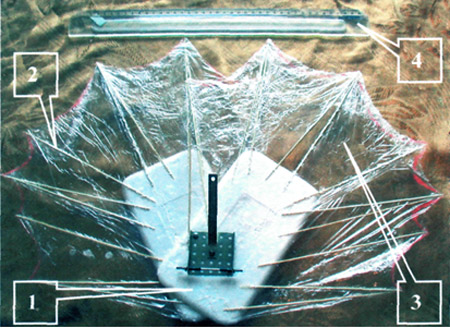
Для другого эксперимента изготавливалось одно крыло в виде, показанном на рис. 12.
Это крыло было собрано из каркаса, материалом несущей части которого послужил тонкий листовой пенопласт толщиной 3 мм., дополненный
круглыми бамбуковыми палочками, диаметром от 1 до 3 мм. Вся несущая конструкция покрывалась тонкой полимерной пленкой, толщиной
15 микрометров.
Рис.12 Вариант искусственного крыла. 1 - пенопластовая часть каркаса; 2 -бамбуковые палочки; 3 - полимерная пленка; 4 линейка - длина 40 см
Такая конструкция искусственного крыла позволяла провести ряд испытаний, целью которых было проведение сравнения маховых движений в варианте веера и в нашем варианте (правило U = 0,29). Оказалось, что веероподобное движение крыла создает интенсивные воздушные вихревые потоки, очень слабо способствующие возникновению силы тяги крыла. В то же время удар крыла в соответствии с правилом U = 0,29 дает устойчивую силу тяги, во много раз превосходящую ее значение при веероподобном движении крыла.
Объяснить это различие можно тем, что при веероподобном движении в рассеиваемых массах воздуха принимают участие воздушные массы, не способствующие результирующему движению крыла вперед. Т.е. средний импульс потоков рассеянного воздуха близок к нулю.
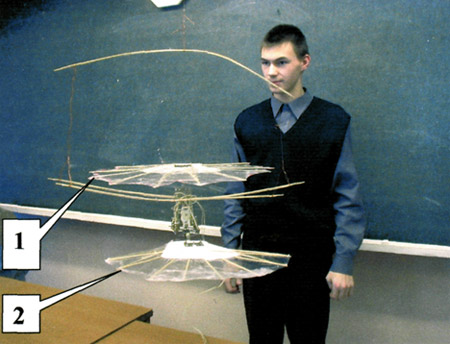
Рис.13 Стенд с движителем (1) и стабилизатором (2) во взвешенном состоянии. Стенд готов к выполнению измерений
3.3 Результаты измерений
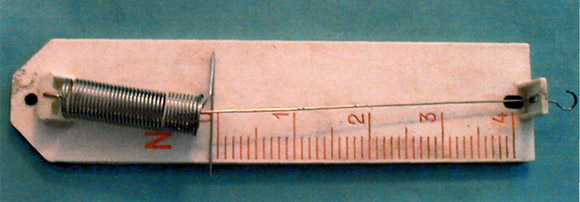
Для измерений различных сил использовался обычный школьный динамометр с полной шкалой измерений до 4 Н и минимальным делением 0,1 Н (рис. 14). Для измерения массы стенда использовались два таких динамометра, поскольку сила тяжести для стенда, равная 5,2Н превосходила максимальное для одного динамометра значение.
Для измерения временных интервалов использовался секундомер с точностью до 0,001 секунды.
Измерения пути, проходимого моделью судна, осуществлялись с помощью сантиметровой линейки, длиной 40 см.
Измерения времени и силы осуществлялись несколько (до трех) раз различными операторами (до трех человек). Полученные измерения усреднялись и только после этого использовались в дальнейших расчетах.
Измеряемые величины
Fcp — сила, действующая на крыло: определяется динамометром в процессе работы движителя.
Рис.14 Динамометр школьный. Одно деление динамометра равно 0,1 Ньютона
Угловая скорость ω определилась числом n возвратно-поступательных движений штока за одну секунду, умноженным на 2π радиан.
Сила тяги Fтяги, создаваемая движителем, определялась путем ее измерения с помощью динамометра, закрепленного, с одной стороны, корпусом в штативе, с другой стороны, захватом для измерений за корпус модели. Динамометр располагался параллельно к горизонту. Удержание стенда на месте с помощью динамометра позволяло измерить силу тяги.
Скорость V движения стенда под действием силы тяги определилась из условия равенства потенциальных энергий П=mgh максимально отклонившегося от положения равновесия физического маятника = стенда, подвешенного на нити (рис.13) и максимальной кинетической энергии K=mV2/2 маятника в нижней точке. То есть, V=√(2gh). Масса маятника m=0,52 кг. При длине нити L=1,4 м и горизонтальном уклонении s=0,028 м высота h, на которую поднялся маятник, оказалась равной 0,00028 м. Это соответствует скорости V=0,074 м/с.
Плечо r кривошипа, равное 0,01 метра, конструктивно определило полный путь S, проходимый штоком за один полный цикл его возвратно-поступательного движения, как S=4×r=0,04 м. В свою очередь, величина d=S×n определяет путь пройденный штоком или точкой захвата за 1 секунду, поэтому средняя скорость U движения численно равна d.
Рассчитываемые величины
Коэффициент полезного действия η определяется отношением
η= Aпол/Aзатр, (1)
где Aпол=полезная работа движителя, а Aзатр– затраченная работа движителя.
По определению мощность N – это работа в единицу времени, т.е Nпол= Aпол/Δt, а Nзатр= Aзатр/Δt, где Δt – интервал времени (в нашем случае Δt=1с, в течение которого выполнялась работа. Тогда коэффициент полезного времени может быть определен как
η =Nпол/Nзатр , (2)
Определим полезную мощность из выражения
Nпол= Fтяги×V , (3)
а затрачиваемую мощность как
Nзатр= Fср×d , (4)
Здесь используется численное равенство средней скорости движения штока пути d, проходимому захватом штока за одну секунду.
В таблице 1 приведены результаты измерений и вычислений для предлагаемого движителя.
Таблица 1
|
n,
об/с |
Fср,
Н |
d,
м |
Fтяги,
Н |
V,
м/с |
Nпол,
Ватт |
Nзатр,
Ватт |
η,
% |
| наш движитель |
5.28 |
0.049 |
0.21 |
0.10 |
0.074 |
0.0074 |
0.010 |
74 |
Из таблицы видно, что наш движитель обладает существенным преимуществом перед винтовыми движителями, поскольку в максимальное теоретическое значение КПД винта равно приблизительно 80%, что почти в два раза выше КПД винта в маршевом режиме, КПД = 45 ÷50% [9].
Заключение
При изготовлении моделей учитывались результаты исследований, содержащихся в проекте «Почему летают птицы» (Ярмарка идей на Юго - Западе. Москва – 2004.) [7]. В частности, использование маховых перьев, учтено ранее, для них найдено правило U = 0,29 , а также «эффект жалюзи» для группы перьев одного крыла. Сам же движитель по аналогии с крылом птицы является составным, т. е. состоящим из группы перекрывающихся маховых перьев.
Для лабораторных испытаний изготовлен и применен электромеханический привод, осуществляющий поперечные колебания движителя.
В ходе испытаний моделей движителя, изготовленных как из природных, так и синтетических полимерных материалов получено, что и в других случаях при знакопеременном воздействии силы, прикладываемой к движителю, возникает сила тяги, принуждающая модель двигаться поступательно вперед. Величина этой силы зависит от амплитуды и частоты колебаний, а также от площади поверхностности движителя.
Исследования движителей принципиально подтвердили исходную гипотезу проекта: искусственно замещая подъемную силу крыла прикладываемой силой, приводя крыловую поверхность в силу её гибкости к форме, близкой к форме крыла птицы, добиваемся того, что возникает поток воздуха, поведение которого соответствует поведению встречного потока воздуха, в обычной картине возникновения подъемной силы крыла.
КПД нашего движителя по нашим оценкам оказалось равным 74%.
Ограниченность выбора конструкционных материалов условиями школьной лаборатории не позволила изготовить действующий макет привода с современными
качественными характеристиками - стенд тяжелый для использования его в летательных аппаратах с самостоятельным взлетом.
Но, учитывая большую грузоподъемность дирижабля, влияние этого фактора может быть снижено до экономически несущественного уровня.
Источники:
- Анатолий Довбня. КИТЫ НЕБЕСНОГО ОКЕАНА, http://tvplus.dn.ua/column.php^
div=chrono&art=0017.
- http://www.snab.ru/arhiv/2003/index.html?n=45&s=9A. Ф. Ренкель, патентовед.
"Дирижабли возвращаются".
- http://rosaerosystems.pbo.ru/russian/products/pd_300.html. НПО "РосАэроСистемы".
- http://pla.by.ru/muskul_maholet.htm. Махолеты.
- http://chudesa.by.ru/pticy.html Секрет машущего полёта птиц, http://newfiz.narod.ru,
А.А.Гришаев, А.А.Гришаев (старший).
- И.А. Азарьев. КПД МАХОЛЕТА. Журнал Авиация общего назначения. 12, 99
http://www.aviajournal.interami.corn/sections/journal/arh/magazine/archive/1299/st4_12
99.html.
- "ПОЧЕМУ ЛЕТАЮТ ПТИЦЫ". Исследовательская работа РУЧКИНА ИВАНА,
АЛЕКСЕЕВА КОНСТАНТИНА, БЕЛЫХ АНДРЕЯ. Школа № 1273. "Ярмарка
идей. ЮЗ АО, Москва, 2004.
- Отто Лилиенталь. Полет птиц как основа искусства летать. Институт
компьютерных исследований. Москва-Ижевск.2002г., 232 стр.
- Гидроаэродинамика. Л. Прандтль. R@C Dynamics.Москва-Ижевск: НИЦ
"Регулярная и хаотическая динамика", 2002, 572 стр.
|