| |
Материалы научно-исследовательских проектов
Новые типы движителей для плавсредств
Ниже приведена одна из двух ученических опытно-конструкторских работ, являющихся продолжением исследовательских проектов
«Почему летают птицы» и «Подводный кайт», содержание которых кратко изложено в статье «Полёты в воздушной и водной средах» («Физика» № 29/2004).
Проекты были выполнены при технической помощи ОАО «Мика-Антикор» и представлялись на конкурсе «Ярмарка идей на Юго-Западе» в апреле 2005 г., где
заняли первое место.
Ученический научно-исследовательский проект
Авторы: Дмитрий Краснопевцев, Алексей Шапкин.
Школа № 1273 ЮЗАО, 10 класс, Москва.
Тема работы: Новые типы движителей для плавсредств
Научный руководитель: Устюгина Галина Павловна, учитель физики.
Консультант: Устюгин Юрий Евгеньевич, физик, кандидат физ.-мат. наук.
Наши предыдущие исследования [1, 2] привели к мысли, что возвратно-поступательное воздействие знакопеременной силы на движитель определённой
формы может привести к появлению силы тяги, поперечной к направлению воздействия, и высокоэкономичной работе движителя. Эти предположения мы
проверяли методом физического моделирования: изготавливали соответствующие движители и приводы для них, создавали модели плавательных средств с
двигательно-движительной системой и исследовали их работу. Выяснилось, что предлагаемые нами новые движители по экономическим показателям
превосходят такой широко используемый для движения транспортных средств в воздухе, на воде и под водой, как винт.
1. Проблема экономичности
Рекордсмен подводного
плавания – меч-рыба Энергию живые существа получают за счёт окислительных процессов. Но рыбы – существа холоднокровные, их температура ненамного выше температуры
воды, в которой кислород, кстати, растворён в очень небольшом количестве. Такие мощности для них недостижимы! Остаётся предположить только одно:
рыбы каким-то образом «умеют» очень сильно понижать сопротивление воды. Гипотезу, объясняющую этот феномен, выдвинул профессор Института
теоретической и прикладной механики СО РАН В.И.Меркулов (г. Новосибирск) [3].
Tрадиционные движители для плавсредств
Существует четыре основных вида судовых движителей: водомётный, гребное колёсо, гребной винт и крыльчатый.
Водомётный движитель. Это, по существу, просто поршневой или центробежный насос, который засасывает воду через отверстие в носу или
днище корабля и выбрасывает её через сопла в кормовой его части. Создаваемый упор (сила тяги) определяется разностью количеств движения (импульсов) струи воды на выходе и на входе движителя. Водомётный движитель был впервые предложен и запатентован Тугудом и Хейсом
в Англии в 1661 г. Как и другие, предложенные разными изобретателями более поздние варианты, конструкция обладала низким КПД. Водомётный
движитель применяется, когда низкий КПД компенсируется преимуществами в других отношениях, например, для плавания по мелководным или засорённым
рекам.
Гребное колесо. Это широкое колесо с лопастями по периферии. В более совершенных конструкциях лопасти могут поворачиваться относительно
колеса так, чтобы создавать нужную пропульсивную силу при минимальных потерях. Ось вращения колеса выше уровня воды, так что погружена лишь его
небольшая часть, и в каждый данный момент времени только несколько лопастей создают упор. КПД гребного колеса, вообще говоря, возрастает с
увеличением его диаметра, так что колёса диаметром 6 м и более – не редкость. Частота вращения большого колеса получается небольшой. Когда-то она
соответствовала возможностям паровых машин, однако со временем машины совершенствовались, и малые обороты стали серьёзным препятствием – гребные
колёса уступили место гребным винтам.
Гребной винт. Винт использовали ещё древние египтяне для подачи воды из Нила. Есть свидетельства, что в средневековом Китае для
движения судов использовали винт с ручным приводом. В Европе винт в качестве судового движителя впервые предложил Р.Гук (1680 г.).
Размеры современных гребных винтов варьируются от 0,2 до 6 м и более. Мощность, развиваемая винтом, может составлять доли киловатта, а может
превышать 40 МВт, соответственно частота вращения лежит в диапазоне от 2000 об/мин для малых винтов до 60 об/мин для больших. КПД хороших винтов
может достигать 80%, однако на практике довольно трудно оптимизировать все основные параметры, поэтому на малых судах КПД обычно около 45%.
Максимальный КПД достигается при относительном скольжении (отношение скорости движения судна к скорости перемещения движитекля.) 10–30% и быстро
уменьшается до нуля при работе винта как в режиме швартовки, так и при больших оборотах [4].
Общий вид крыльчатого
двигателя
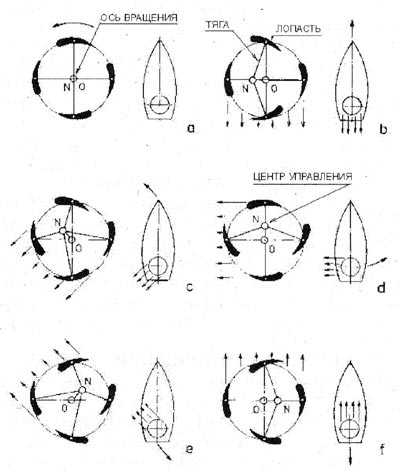 |
Крыльчатый движитель – пропеллер Воиса–Шнайдера с четырьмя
лопастями. Лопасти вращаются с ротором относительно центральной т. О в одном направлении с постоянной скоростью и связаны жёсткими
штангами в т. N, которая не вращается вместе с ротором. Если эта точка смещена относительно т. О, то угол атаки каждой лопасти по
отношению к касательной к окружности изменяется по мере движения точки захвата лопасти по окружности. Управление судном очень легко
осуществляется смещением т. N: чем больше она удалена от оси вращения O, тем больше сила тяги пропеллера |
Движитель типа «рыбий хвост».Природа постоянно демонстрирует человеку один из самых лучших и эффективных движителей – хвост рыбы,
совершающий характерные визуально наблюдаемые колебательные движения. Соответствующим движителям придают форму, близкую к форме хвоста рыбы, и
принуждают его совершать колебательные движения. Одним из примеров является разработка Г.А.Семёнова [6, 7]. Как он пишет, «...многим
известен „парадокс Грея”: дельфин, развивая скорость 10 м/с, должен иметь мощность, в 10 раз большую им располагаемой. Из этого, на мой взгляд,
следуют такие выводы: 1) современные плавсредства при мощностях, которыми они располагают, должны передвигаться со скоростями, хотя бы в
несколько раз большими; 2) при неизменном запасе топлива плавсредство с таким же движителем, как у дельфина, обеспечит в 10 раз большую дальность
плавания». В разработанной им модели катамарана с плавниковым движителем главной особенностью является клин,
позволяющий повысить КПД. Однако, на наш взгляд, движитель Семёнова, как и другие аналогичные, является гребковым движителем,
принципиально отличающимся от природного «рыбьего хвоста» и потому не способным достичь его КПД.
|
|